04. Projects
04 SF Projects V1
Projects
Each course in this program concludes with a project. These are portfolio projects that are exciting to share with the world!
Lidar Obstacle Detection
Detect other cars on the road using raw lidar data from Udacity’s real self-driving car, Carla! Implement custom RANSAC and euclidean clustering algorithms.
Track An Object In 3D Space

Detect and track objects from the benchmark KITTI dataset. Classify those objects and project them into three dimensions. Fuse those projections together with lidar data to create 3D objects to track over time.
Radar Target Generation And Detection
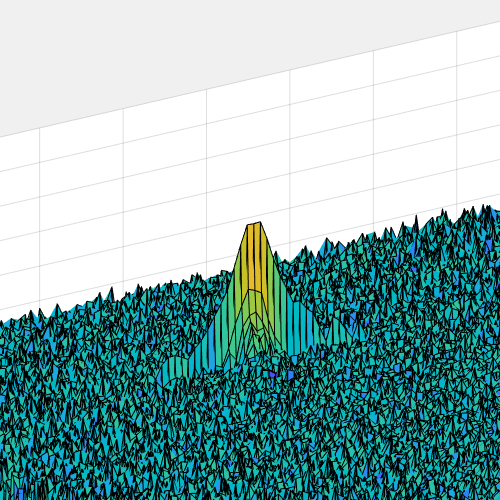
Calibrate, threshold, and filter radar data to detect obstacles in real radar data.
Unscented Kalman Filter Highway Project
Put your skills to the test! Code an Unscented Kalman Filter in C++ to track highly non-linear pedestrian and bicycle motion.